
TÓM TẮT
Đề tài được thực hiện tại BM Cơ Điện Tử, Khoa Cơ Khí Công Nghệ trường ĐH Nông Lâm Tp. HCM, sau 12 tháng thực hiện đề tài đạt được một số kết quả như sau:
- Kết quả khảo sát máy sấy ngang dòng tại Cơ Khí Công Nghệ trường ĐH Nông Lâm Tp.HCM.
- Thiết kế chế tạo tủ điều khiển gồm:
+ Bộ điều khiển gồm 6 cảm biến nhiệt và một cảm biến độ ẩm.
+ Phần công suất gồm: bộ biến đổi công suất AC- AC dùng 6 Triac cho phép điều khiển đóng mở hoặc điều khiển tuyến tính các điện trở đốt nóng.
- Xây dựng chương trình điều khiển chạy trên máy tính hoặc trên trang web liên kết với tủ điều khiển để điều điều khiển nhiệt độ và cho phép lưu trữ các giá trị nhiệt độ, độ ẩm tại các điểm cần đo.
- Kết quả cho thấy: hệ thống ổn định sai số khoảng ± 50
Sản phẩm của đề tài được ứng cho máy sấy ngang dòng thay thế bộ điều khiển bằng tay bằng cách đóng các điện trở đốt nóng. Bộ biến đổi AC- AC dùng van bán dẫn cho phép thay đổi tuyến tính công suất điện trở nóng nhằm ứng dụng phương pháp điều khiển PID vào hệ thống cho kết quả điều khiển chính xác hơn. Chương trình điều khiển cho phép điều khiển và lưu trữ các giá trị nhiệt độ, độ ẩm tại các vị trí cần đo
1.Khảo sát máy sấy ngang dòng.
Các bộ phận và nguyên lý hoạt động của máy sấy tháp ngang dòng MST-ND_300-2i được minh họa dưới hình 2.1.

Hình 2.1. Các bộ phận của máy sấy tháp ngang dòng MST-ND_300-2 i
- Quạt ly tâm 2. ống dẫn khí 3.buồng đốt
- ống dẫn tác nhân sấy 5.buồng sấy 1 6. buồng sấy 2
- buồng chứa nguyên liệu 8.gầu tải 9.vít tải 10.đế tháp sấy.
Hoạt động của máy sấy tháp ngang dòng.
Máy sấy được cấp liệu bằng gầu tải, gầu tải đưa vật liệu lên cao và đổ vào tháp chứa nguyên liệu của máy sấy bằng phương pháp ly tâm, đồng thời quạt ly tâm và nguồn điện cũng sẽ được cấp cho buồng đốt. Nhiệt lượng ở buồng đốt sinh ra được quạt thổi đi theo hướng của ống đẫn đến buồng sấy 1 và buồng sấy 2 của máy sấy. Dòng vật liệu ở tháp chứa liệu sẽ duy chuyển vào buồng sấy thứ nhất, ở đây vật liệu được tác nhân sấy tác động đầu tiên. Sau đó dòng vật liệu tiếp tục duy chuyển tới bộ phận đảo chiều lúc này các vị trí dòng hạt gần tác nhân sấy trong buồng thứ nhất sẽ được duy chuyển xa tác nhân sấy hơn ở trong buồng sấy thứ 2 và vị trí dòng hạt xa tác nhân sấy ( sẽ có ẩm độ lớn hơn) được duy chuyển tới vị trí gần tác nhân sấy trong buồng sấy thứ 2 . Vật liệu tiếp tục duy chuyển xuống vít định lượng và duy chuyển ra ngoài máy sấy kết thúc một chu trình sấy. Hoạt động của máy sấy được biểu diễn thông qua hình 2.6.

Hình 2.6 Mô phỏng hệ thống máy sấy tháp ngang dòng.
Dựa vào kết quả khảo sát chúng em lắp đặt cảm biến như hình 2.7 .

Hình 2.7. Vị trí đặt cảm biến.
- Ta sẽ đặt cảm biến nhiệt độ ở hai buồng sấy, ba cảm biến nhiệt độ ở buồng sấy thứ nhất và ba cảm biến nhiệt dộ ở buồng sấy thứ hai, sau khi sấy ở buồng thứ nhất cần một khoảng thời gian và cần phải đọc được nhiệt độ vị trị chảy của dòng hạt trong ở buồng sấy thứ nhất để điều khiển nhiệt độ ở buồng sấy thứ nhất trước khi qua bộ phận đảo chiều dòng hạt.
- Sau khi đảo chiều dòng hạt vật liệu chuyển xuống buồng sấy thứ hai ở buồng sấy này hạt ở gần tác nhân sấy ở buồng thứ nhất sẽ được đảo chiều những vị trí dòng hạt ở xa tác nhân sấy hơn (có ẩm độ cao hơn) hạt có ẩm độ cao hơn sẽ được đưa tới gần tác nhân sấy hơn trong buồng hai cũng trong buồng này sẽ được gắn 3 cảm biến đo nhiệt độ trong buồng sấy này và để điều khiển nhiệt độ sấy trong buồng này.
- Cảm biến ẩm độ được đặt ở gần đầu ra vít định lượng để đo ẩm độ ,đối với mỗi loại vật liệu khác nhau sẽ có ẩm độ bảo quản khác nhau. Việc lắp đặt cảm biến ẩm độ ở gần đầu ra để so sánh lượng ẩm độ mất đi. Để quyết định điều kiện bảo quản của vật liệu, nếu chưa đáp ứng được điều kiện này thì tiếp tục sấy lần hai, đến khi nào đáp ứng được điều kiện trên thì kết thúc quá trình sấy.
2.PID
Công thức tính cho PID liên tục.

Hình 2.18. Công thức PID liên tục.
Công thức tính cho PID rời rạc.
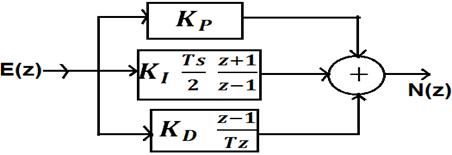
Hình 2.17. Công thức PID rời rạc.
Để tìm hiểu về phần PID bạn có thể tham khảo trong bài báo cáo của mình link mình có để dưới bài viết.
3.Cảm biến nhiệt độ (Thermocouple loại K).
Điện áp được tạo ra bởi cặp nhiệt điện: .
- V: điện áp đo được (V).
- S: hệ số Seeback (V/0C).
- : chênh lêch nhiệt độ giữa hai đầu mối nối.
Nhiệt độ đo được tính theo công thức: (0C).
Thermocouple loại K: Ở nhiệt độ môi trường điện áp của thermocouple loại k rất bé. Vì vậy phải khếch đại tín hiệu trước đọc giá trị của cảm biến.
OP-AMP khuếch đại điện áp đầu vào thermocouple và IC LM35 để bù nhiệt độ cho Thermocouple vì ở nhiệt độ của môi trường điện áp Thermocouple rất bé không đủ để đọc tín hiệu.
Bảng 1 . Sự thay đổi điện áp khi nhiệt độ thay đổi.
Đơn vị (mV) |
| 0C | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 0 | 0.000 | 0.039 | 0.097 | 0.119 | 0.158 | 0.198 | 0.238 | 0.277 | 0.317 | 0.357 | 0.397 |
| 10 | 0.397 | 0.437 | 0.477 | 0.517 | 0.557 | 0.597 | 0.637 | 0.677 | 0.718 | 0.758 | 0.978 |
| 20 | 0.798 | 0.838 | 0.879 | 0.919 | 0.960 | 1.000 | 1.041 | 1.081 | 1.122 | 1.168 | 1.203 |
| 30 | 1.203 | 1.244 | 1.285 | 1.326 | 1.366 | 1.407 | 1.448 | 1.489 | 1.530 | 1.571 | 1.612 |
| 40 | 1.612 | 1.653 | 1.694 | 1.735 | 1.776 | 1.817 | 1.858 | 1.899 | 1.941 | 1.982 | 2.023 |
Bạn có thể tham khảo bảng nhiệt độ thermocouple type K tại đây: https://www.thermocoupleinfo.com/type-k-thermocouple.htm

Hình 2.16. Sơ đồ mạch khuếch đại.
Nguyên lý mạch bù nhiệt độ thermocouple type K: https://industrialcircuits.wordpress.com/2014/07/28/thermocouple-measurement-clarification/
Điều chỉnh biến trở về 200 ôm thì sẽ đo được nhiệt của môi trường.
Công thức tính RG : Tại đây
4.Mạch đồng bộ.
Điện áp ngõ ra của mạch được nối với chân ngắt ngoài của vi điều khiển, khi phát hiện tín hiệu đồng bộ chương trình ngắt sẽ được gọi, trong chương trình ngắt ta thay đổi góc kích của triac bằng cách thay đổi khoảng thời gian delay. Khoảng thời gian delay này được tính toán nhờ thuật toán PID.
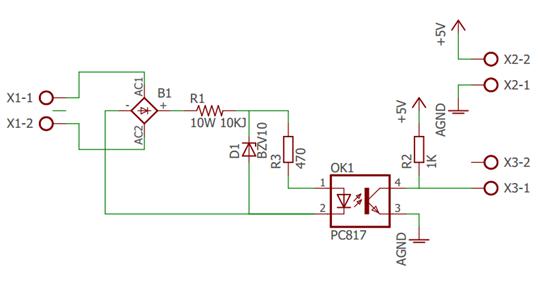
Hình 3.6 Mạch nguyên lý của khối đồng bộ.
Cấp điện áp 220VAC qua cầu điốt (Chỉnh lưu toàn phần), ta được điện áp với toàn bán kỳ dương Vbrigde dao động với tần số f = 50Hz, tức chu kỳ dao động
T = 0.02s = 20ms vậy nữa chu kỳ giao động là Thaft = T/2= 10ms.
Dòng điện đi qua cầu điốt tới Điốt Zener (với điện áp ngược của điốt Zener là Vz= 5.1V). Chức năng của điốt Zener này rất quan trọng, nó có chức năng ghim áp. Tức là khi:
Vbrigde < Vz thì điện áp chạy qua điện trở 470Ω lúc này điốt Zener dẫn thuận và được xem như một điốt bán dẫn bình thường.
Vbrigde > Vz lúc này điốt Zener dẫn nghịch và được xem như một nguồn 5.1V.
Đồ thị biểu diễn tín hiệu đồng bộ được mô phỏng bằng phần mền Proteus.

Hình 3.7. Dạng sóng của mạch đồng bộ.
Hoạt động: khi Vbrigde > Vz thì led trong PC817( mạch cách ly quang) sẽ phát sáng kích dẫn chân 3 và chân 4 của PC817 được nối với nhau, lúc này chân tín hiệu kết nối với vi điều khiển được nối xuống Mass.
Dựa vào đặc điểm này ta có thể sử dụng ngắt ngoài của vi điều khiển để nhận biết tín hiệu đồng bộ của điện áp xoay chiều, từ đó tính được góc mở cho triac. Ta chỉ điều khiển thời gian trong khoảng 1ms ÷ 9ms không thể lấy thời gian ở khoảng 0ms ÷ 10ms để điều khiển vì có khoảng thời gian trễ để điện áp tăng lên 5V và giảm về 5V.
 Hình 3.8. Điều khiển góc mở của triac.
Hình 3.8. Điều khiển góc mở của triac.
Mối quan hệ giữa góc mở và thời gian.
- t1 tương ứng với góc mở của triac.
- t2 thời gian xung kích của chân G để kích dẫn .
- t3 khoảng thời gian mà dòng điện đóng ngắt trong nữa chu kỳ.
- tương tự như vậy đối với chu kỳ âm.
6.Khối Wifi.
Module wifi được kết nối với vi xử lý bằng chuẩn giao tiếp UART chân TX của vi xử lý được nối với chân RX, chân RX của vi điều khiển nối với chân TX.
Bạn có thể tìm thấy sự hướng dẫn cụ thể và chi tiết trong 4 bài Lập trình arduino nâng cao: http://arduino.vn/bai-viet/1496-esp8266-ket-noi-internet-phan-1-cai-dat-esp8266-lam-mot-socket-client-ket-noi-toi
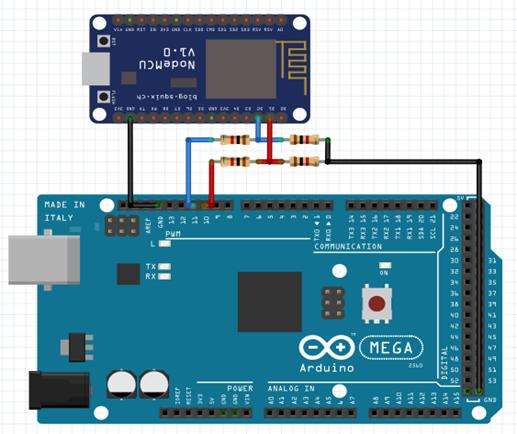
Hình 3.10.Sơ đồ kết nối ESP 8266 với Mega 2560.
7.Phần mền điều khiển bằng Visual Basic 6.0.
Phần mền được viết bằng ngôn ngữ VB6.0 thông qua giao tiếp UART. Source code dưới bài viết, lưu ý phải cài đặt teechart 5.0 , mswinsck.ocx, MSCOMM32.OCX, Font tiếng việt…..

8.Link download:
- Bài báo cáo || Link dự phòng
- Bài báo || Link dự phòng
- Source code || Link dự phòng
- File cài đặt || Link dự phòng
Bài viết các bạn có thể tham khảo thêm:



